Dans un premier temps, nous collecterons des données multispectrales à l’aide d’un drone DJI Matrice 300 et d’un double capteur MicaSence RedEdge-P. L’objectif est de surveiller la culture et de définir ensuite l’action agricole.
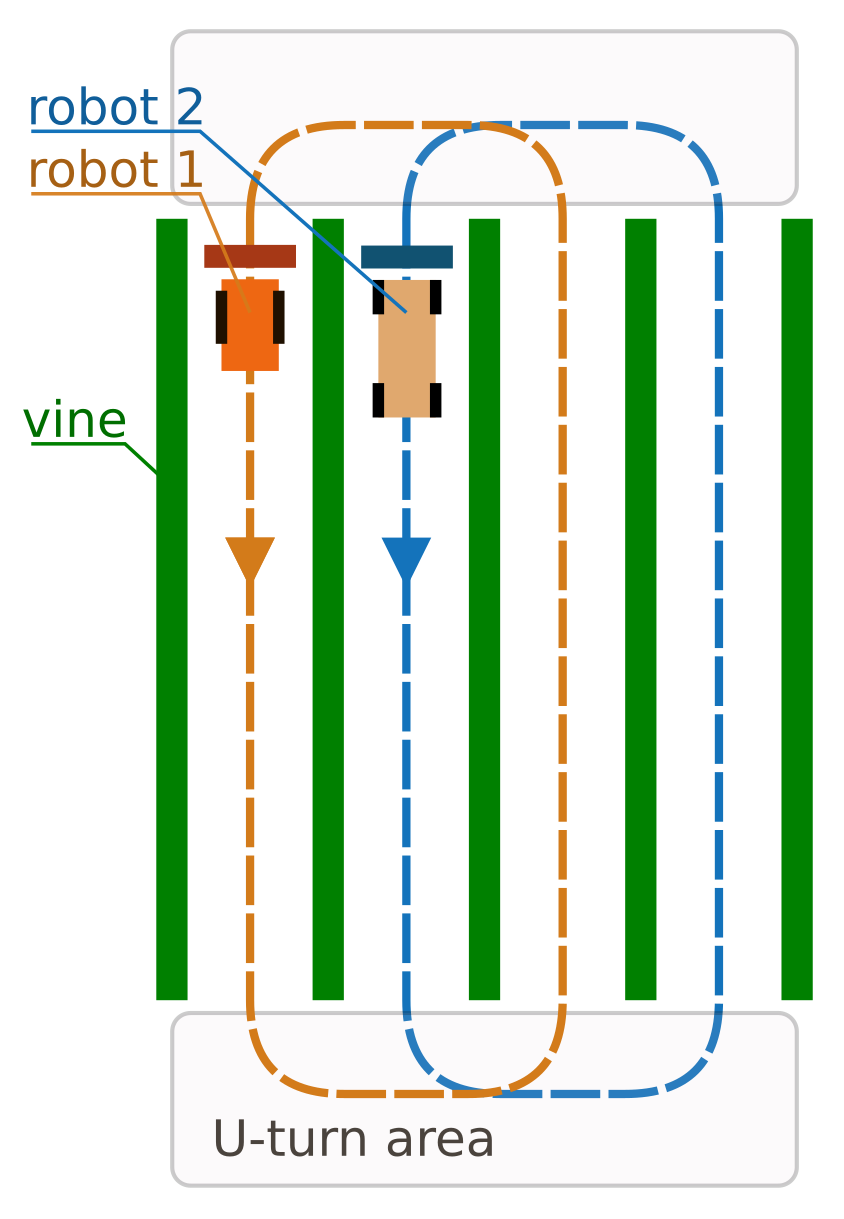
Ensuite, l’objectif de la démonstration est de réaliser une tâche agricole à l’aide de deux robots qui travaillent en coopération. Le robot 1 est le leader et essaie de suivre une trajectoire à une vitesse constante en utilisant le RTK GNSS (real-time kinematic global navigation satellite system). Le second essaie de suivre sa propre trajectoire en utilisant le même capteur, mais en contrôlant également sa vitesse afin de maintenir une distance souhaitée par rapport au leader tout au long de la trajectoire. Par exemple, il est possible de voyager côte à côte ou à quelques mètres en dessous du leader.
Au bout de la ligne, les robots effectuent le demi-tour l’un après l’autre. Par exemple, si le robot suiveur est le premier à atteindre la zone de demi-tour, il réserve la zone, effectue le demi-tour, et la libère lorsqu’il a terminé. Le deuxième robot attendra que la zone de demi-tour soit vide avant d’y pénétrer.
Les robots sont équipés d’outils qui peuvent être commandés pour effectuer une tâche dans le vignoble. Dans le cas de cette démonstration, ils se contenteront de rouler sur le sol.